Управление 7-звенным роботом-манипулятором на основе многокритериальной оптимизации (MOO)
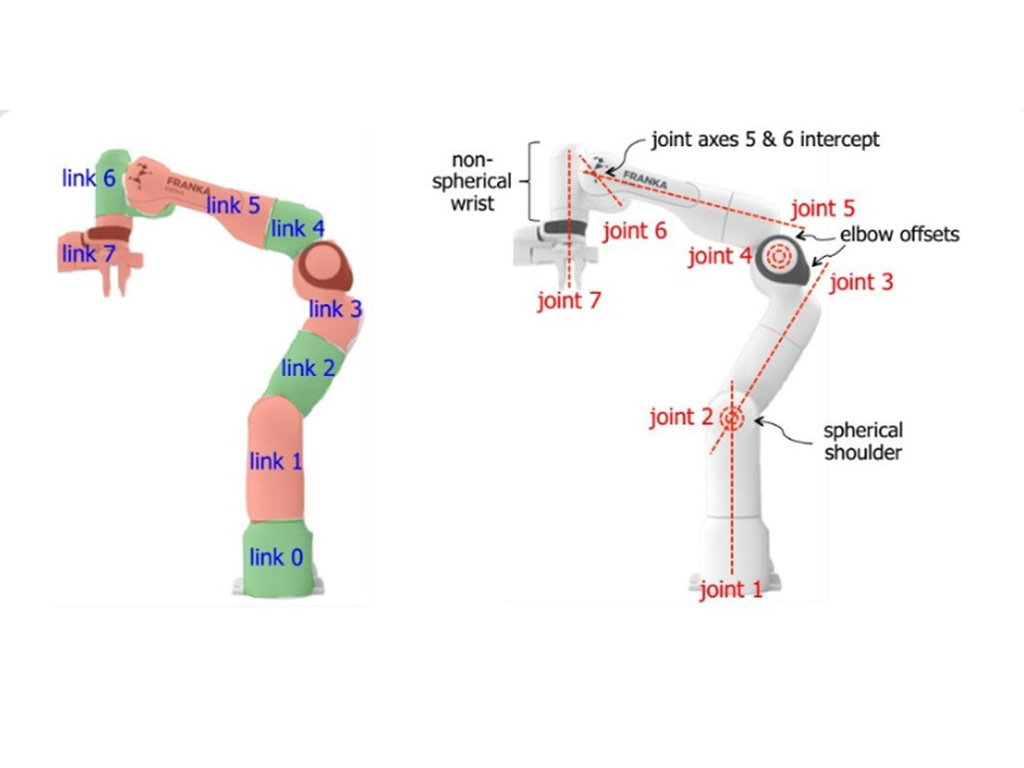
Наша платформа использует методы многокритериальной оптимизации (MOO) для управления семизвенным роботом-манипулятором (7DOF). Такой подход обеспечивает точное управление конечным положением путём балансировки нескольких целей, включая минимизацию затрат и максимизацию скорости перехода.
С помощью MOO пользователи добиваются высокой эффективности и оптимального управления, выполняя сложные задачи с повышенной точностью и производительностью
Кроме того, наша система управления включает динамическое взвешивание критериев, адаптирующееся к обратной связи в реальном времени, что обеспечивает плавные движения даже в условиях неопределённости. Алгоритм оптимизации на основе Парето выявляет компромиссы между точностью, энергопотреблением и ограничениями крутящего момента звеньев. Это позволяет безопасно и стабильно работать в различных промышленных и исследовательских сценариях. В результате достигается надёжное интеллектуальное управление с улучшенной точностью выполнения задач и сниженной вычислительной нагрузкой